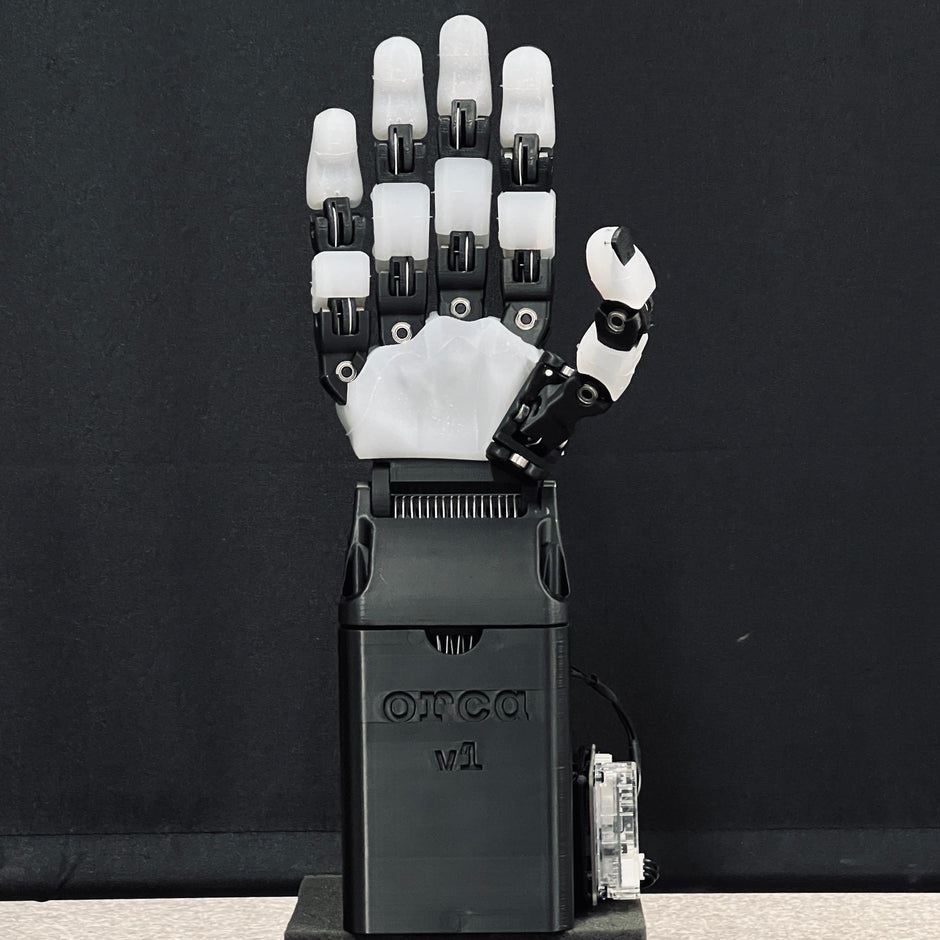

ORCA v1 Open-Source Dexterous Robotic Hand
ORCA v1 is an open-source tendon-driven robotic hand platform that combines affordable dexterous hardware, tactile sensing, simulation, and open control software into a builder-friendly manipulation stack.
Open HardwarePython ControlSimulationMechanicalElectricalSoftwareFirmwareSpicyExample
Updated March 23, 2026